[VIP第1年] 指数:3
[VIP第1年] 指数:3
麦克纳姆轮驱动结构是AGV底盘设计中的一个特殊方案,特别适合于运行频率不高、但要求具有极高运动灵活度的应用场合。该底盘由四个麦克纳姆轮组成,其较大的特点是可以实现任意方向的平移或旋转。为保证理想的运动控制,需要确保四个轮子同时与地面接触,因此设计时通常采用浮动桥臂等结构方案来实现这一点。然后,在选择AGV底盘结构设计时,需综合考虑使用环境、载荷需求和行进速度等因素。结构稳定性、驱动能力和转弯半径等性能参数也应作为选择的依据。同时,平衡生产成本和维护成本也是实际应用中需要考虑的重要问题。机器人底盘的设计考虑了环境友好性,采用低能耗和可回收材料制造。深圳自主导航底盘

双舵轮AGV是指一台AGV车配置两台舵轮,配两只AGV专门使用万向轮 inagv®脚轮(四轮结构)或四只 inagv®脚轮万向轮(六轮结构)。需要更多详细方案配置请联系我们,我们专业的工程师团队为您服务。四舵轮AGV移动机器人解决方案,配置四舵轮驱动的四驱移动设备,可实现零回转半径、侧移、全方面无死角任意漂移,二维平面内的任意方向的移动功能,包括直行、横行、斜行、任意曲线移动、原地360°等全向移动形式。整体性能优于传统其他结构形式的AGV小车,舵轮AGV小车解决方案结构简单,控制简易,便于维护,寿命更长。深圳自主导航底盘机器人底盘的通信模块稳定可靠,能够实现远程监控和数据传输。

模块化定位导航系统(SLAMWARE),模块化定位导航系统内置SLAM引擎的导航定位主要模块,高度集成,无需借助外部运算资源,可直接输出机器人所在环境地图、定位坐标姿态,内置多种机器人运动控制算法,可提供厘米级别的定位和地图精度,在未知环境中实时规划路径,并进行障碍物规避导航,自主寻找较短路径。在机器人底盘结构除了使其拥有自主定位导航及路径规划功能,自主回充技术也是不可或缺的,而Apollo采用的自主回充技术,可外部调度预约充电。当电量较低时,会自主返回充电坞充电,在负载情况下可实现15小时连续不间断工作,给应用现场提供稳定可靠的表现。
一般情况下舵轮AGV小车的底盘配轮布局方式如:单舵轮驱动、双舵轮驱动、四轮、五轮及六轮结构。配置一台或以上数量的电驱动舵轮,采用配置一只或以上数量的AGV专门使用的辅助万向轮【inagv®脚轮】,以实现AGV小车牵引驱动承载的作用。单舵轮AGV移动机器人解决方案,单舵轮驱动的移动设备,可实现启停-前进-后退-左右拐弯的行走功能。整体性能优于传统差速结构的AGV小车,单舵轮结构控制简单易于维护寿命更长。单舵轮AGV小车是指一台AGV小车配置一台舵轮,配两只 inagv®定向轮(三轮结构)或四只 inagv®辅助脚轮(五轮结构)需要更多配置方案可联系我们了解详情。服务机器人底盘的导航系统可以利用激光雷达、摄像头和惯性导航等技术实现精确的定位和路径规划。

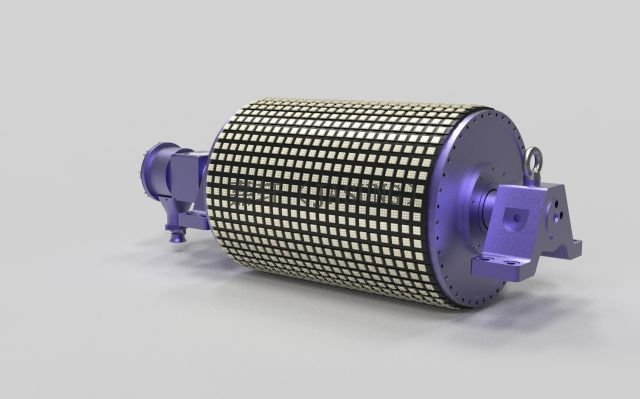
单舵轮驱动结构【适合1T以上负载,牵引车,叉车类应用场景】单舵轮驱动结构是较简单的结构之一,其结构由1个舵轮和2个定向轮组成,在叉车上面有着非常普遍的应用。这种结构可以直接适应各种地面,保证驱动舵轮一定着地。根据车重心分布的不同,舵轮是大概会承担50%的自重,所以牵引力非常强。 但其缺点也显而易见,单轮驱动的AGV在行驶过程中容易发生偏移,并且转弯时需要采用一定的技巧进行控制。二、双舵轮驱动结构【适合1T以上负载,同时要求可以任意方向平移的场合】,双舵轮驱动结构是目前市场上较常见的结构之一,其结构由两个驱动轮和一个或多个非驱动轮组成,通常应用于中等载重的AGV上。由于其结构设计合理,可以更好地保持AGV在直线行驶时的稳定性,并且转弯时无需特殊技巧,因此在市场上得到了普遍应用。机器人底盘上板与电机之间用方铝固定连接。深圳移动服务机器人底盘
机器人底盘具备自主避障能力,可以识别和规避各种障碍物。深圳自主导航底盘
伺服电机的控制,本文主要介绍CAN总线通信方式,RS485的连接方式不在我们的讨论范围之内。SDO模式,一般是电机驱动器上电之后的默认模式。通俗的说,SDO控制模式就是一种「一问一答」的控制模式。驱动器作为Server提供服务,控制端设备(一般为主机)作为Client根据对象字典发送报文给驱动器,驱动器会根据收到的报文执行相应的动作,并且同时反馈一个报文给控制端设备。举个例子,通过 SDO 消息将数据 0x2064 写入到索引为 0x60FF,子索引为 3 的对象字典中:0x601 2F FF 60 03 64 20 00 00 Client -> Server,0x581 60 FF 60 03 00 00 00 00 Server -> Client,也就是说,我们可以通过SDO模式对驱动的参数进行改变从而控制电机。比如,给字典中的速度设置地址发送实时速度值,同时也可以通过读取反馈的方式获取编码器的值。深圳自主导航底盘
文章来源地址: http://jxjxysb.aqfhjgsb.chanpin818.com/qtxyzysb/deta_27608509.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。